Configuration¶
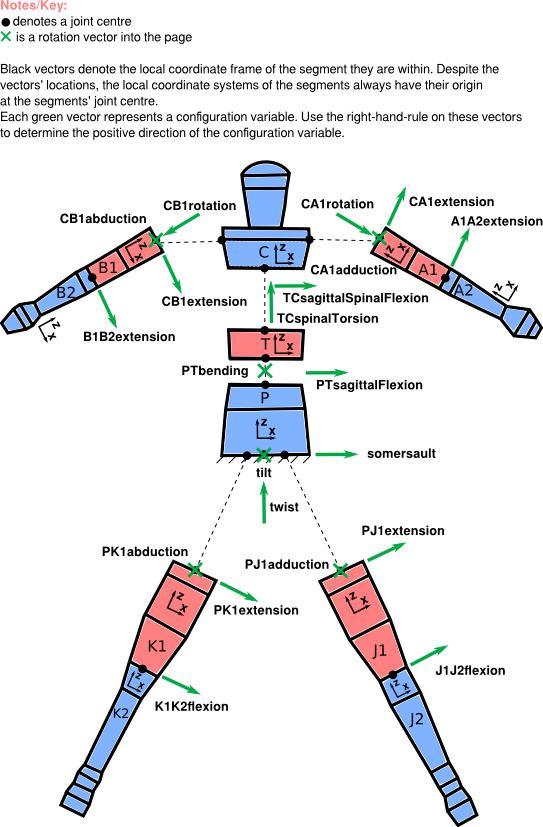
The configuration of the human is set by 21 joint angles. The image below describes all the joints and the joint angles between the segments of the human.
There are two ways to provide the configuration to the package:
- A configuration text file, such as CFGtemplate.txt in misc/, or
here. This file follows YAML syntax.- A dictionary with the correct keys to the constructor of
yeadon.human.Human. The keys are exactly as written in the image below. One can also access theyeadon.human.Human.CFGvariable to see what the dictionary looks like.
Frames¶
Here, we use the term frame to mean a coordinate system: something with an origin and orientation (sometimes a frame does not include an origin, and is just a vector basis).
The global frame is located at the bottom center of the pelvis stadium,
Ls0. The  and
and  axes are in a frontal plane, with the
axis directed to the left and the axis oriented superiorly.
The
axes are in a frontal plane, with the
axis directed to the left and the axis oriented superiorly.
The  axis is directed in the posterior direction.
axis is directed in the posterior direction.
Each segment has its own frame. The origins of the segment frames are denoted
by the black dots, and are at the location of a joint center between two
segments. Solids have their own frame as well, which share the same
orientation of the segment containing them, but are shifted along the
longitudinal () axis of the segment.
Each segment is rotated relative to its parent segment through body fixed x-y-z rotations (x-y-z Euler angles) as specified in M. R. Yeadon, “The simulation of aerial movement–i. The determination of orientation angles from film data.,” Journal of biomechanics, vol. 23, no. 1, pp. 59–66, Jan. 1990.
Location of joint centers¶
Here is a description of the points at which segments are connected to each other (that is, the location of joint centers):
- The joint centers for the legs, for segments J1 and K1, are located at
and
in the frame of the
s0solid, respectively, whereis the thickness of the
Ls0stadium (see Measurements for solid/stadium labels).- The joint centers of the arms are at the Ls4 level, at the midpoint of the semicircular arcs of the Ls4 stadium.
- The two joint centers in the torso are centered along the z-axis of the stadia.